安川電機、クロスコンパスと共同で「AIピッキング機能」を開発:安川電機 産業用ロボット
安川電機は、AIベンチャーのクロスコンパスと共同でロボットによる対象物の認識、しっかりと握り持つ“把持(はじ)”動作の生成および多様なつかみ方を自ら学習するAIピッキング機能を開発した。
安川電機は2017年11月、AIベンチャーのクロスコンパスと共同でロボットによる対象物の認識、しっかりと握り持つ“把持(はじ)”動作の生成および多様なつかみ方を自ら学習するAIピッキング機能を開発したと発表した。
主な用途は部品配膳システム、物品を仕分けるシステムなど。現場では生産ラインの自動化ニーズの多様化により、ロボットに求められる作業のレベルが高度化している。今回の開発はこれに対応し、対象物ごとに多様な把持動作を教示しなければならないユーザーの負担の軽減を図る。また単一グリッパによる多種の対象物把持も可能にする。
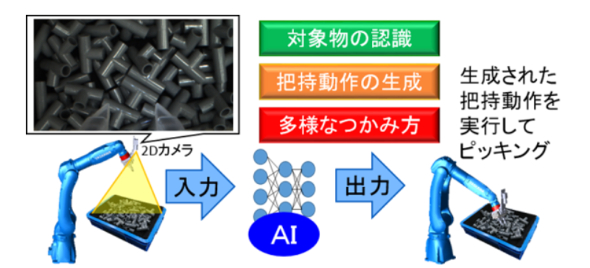 安川電機とクロスコンパスが共同で開発したAIピッキング機能のイメージ 出典:安川電機
安川電機とクロスコンパスが共同で開発したAIピッキング機能のイメージ 出典:安川電機今回開発した機能では、AIにより、ロボットアーム先端の2Dカメラで取得した画像を解析し対象物品の認識、把持動作の生成、多様なつかみ方を学習する。これによりピッキング実行時に自動で対象物の状態に合わせた把持動作を生成できる。学習したAIはロボットに依存しないため、教示作業を省略して他のロボットに移植することも可能だ。
 ロボットイメージ 出典:安川電機
ロボットイメージ 出典:安川電機現状では把持を確実に実行するため対象物に合わせてグリッパを専用に設計し用意する必要がある。しかし新機能では同じグリッパで学習を行うことで、AIが多様なつかみ方を自動で獲得することができるため、単一グリッパで多種の対象物に対応したピッキングシステムを構築できる。
2Dカメラによる低コスト化も特徴の1つ。現状のバラ積みピッキングシステムでは3Dカメラを用いたシステムで高精度に対象物の位置姿勢を認識してピッキングを行うのが一般的だが、新機能では安価な2Dカメラの画像で学習を行うため、低コストでシステムを導入できる。
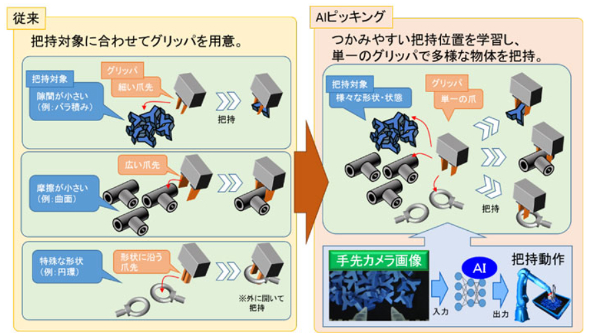 従来との比較 出典:安川電機
従来との比較 出典:安川電機関連記事
 ソフトバンクが「自律化」ロボット販売へ、製造や物流も視野に
ソフトバンクが「自律化」ロボット販売へ、製造や物流も視野に
ヒト型ロボット「Pepper」を販売するソフトバンクロボティクスが、自律型の業務用清掃ロボットを2018年夏に日本国内投入する。自律型ロボットの「頭脳」を既存製品に組み込むことで、ロボット化する。 腐ったミカンもつぶさずにつかめる「リアルハプティクス技術」搭載双腕ロボット
腐ったミカンもつぶさずにつかめる「リアルハプティクス技術」搭載双腕ロボット
NEDOと慶應義塾大学は、身体感覚を伝送できる双腕型ロボット「General Purpose Arm」を開発。世界初をうたう「リアルハプティクス技術」を搭載したマスタースレーブ方式のロボットで、物体の硬さや柔らかさなどの触覚をありのままに伝えることができる。腐ったミカンの除去(選果)など、実用化に向けた取り組みも進められている。 2017年の世界ロボティクス関連市場は日本を除くアジア太平洋地域が最大市場に
2017年の世界ロボティクス関連市場は日本を除くアジア太平洋地域が最大市場に
IDC Japanは、世界のロボティクスおよび関連サービス市場の予測を発表した。 産業用ロボットアームの開発プロセスを最適化する設計手法――新規参入でも短期市場投入が可能に
産業用ロボットアームの開発プロセスを最適化する設計手法――新規参入でも短期市場投入が可能に
豆蔵と東京農工大学は、産業用ロボットアームの開発期間を短縮する設計手法の実用化に関する共同研究の成果を発表した。産業用ロボットアーム開発での実機試作回数を大幅に減らし、早期市場投入を支援する。現在、豆蔵はロボット領域への取り組みを強化しており、今回の設計手法を軸とした開発支援やコンサルティングの他、自社ロボットの開発なども視野に入れているという。 高屈曲ロボットケーブルの短納期・少量生産を実現するオーダーメイドサービス
高屈曲ロボットケーブルの短納期・少量生産を実現するオーダーメイドサービス
沖電線は、高屈曲ロボットケーブル「ORPケーブル・シリーズ」をベースとした、短納期・少量生産のオーダーメイドサービス「ORP-MIXサービス」を2017年2月1日から開始すると発表した。
Copyright © ITmedia, Inc. All Rights Reserved.





会員登録がまだの方はこちら
豊富なホワイトペーパーの中から、製品・サービス導入の検討に役立つ技術情報や導入事例などを簡単に入手できます。
特集
- 設計者CAEの取り組みに関する実態
- マテリアルズ・インフォマティクスの動向調査
- 製造業のアナログ業務の実態調査
- 設計・解析業務におけるAI活用
- 製造現場におけるデータ活用の実態調査
- 3Dプリンタ利用動向調査
- CAD利用動向調査
- 研究・開発職のデジタル活用調査
- 安全安心なIoT機器実現の課題
- 電気設計者の課題と解決
- “つながる工場”の現状と課題
- 製造業におけるAI開発および活用の実態
- 設計・製造現場における品質管理
- 製造業IoTセキュリティ
- IoT時代の組み込みソフトウェア品質
- IoT時代のセキュリティリスクに備える
- 加速する工場と生産設備のデジタル化
- 製造業の省エネ対策と課題
- モノづくり設計者のワークスタイル調査
- タイアップ&セミナーコンテンツ一覧
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。