「ものづくり」へのロボット適用とその進化:製造業のIoTスペシャリストを目指そう(5)(1/2 ページ)
以前は自動化と大量生産だけを目的としていた産業用ロボットですが、最近では多品種少量生産やスマート工場の実現にも不可欠な存在となりつつあります。今回はそんな産業用ロボットの現状を理解しましょう。
はじめに
前回はAI(人工知能)について取り上げましたが、その中で、AIは他の技術と組み合わさり効果を発揮することが多い、特にロボットとの融合は重要だという話をしました。そこで今回はそのロボット、特に産業用(生産用)ロボットに関する内容です。
産業用ロボットの目的

従来の産業用ロボットは「自動化」と「大量生産」という目的に向けて利用されてきましたが、最近では多品種少量生産への対応が重要になってきています。また、この多品種少量生産や、短納期受注に対する対応などを考えると、同時に柔軟な工場レイアウト変更も欠かせません。
この産業用ロボットは従来、保安上の制約から安全柵が必要であり、結果としてロボットが柔軟な工場レイアウト変更を実現する上でのボトルネックとなっていたのです(現在は条件次第で柵を設けずとも利用可能です)。
また、スマート工場の中のキーワードとなっているマスカスタマイゼーションの実現のためにも、この産業用ロボットの位置付けは重要となります。
マスカスタマイゼーション
マスカスタマイゼーションは、スマート工場におけるキーワードになっているだけではなく、第四次産業革命においても重要な要素です。このマスカスタマイゼーションとは、IT(含むIoT)システムにより、特注品(カスタマイズ品)を従来の大量生産と同様のスピードとコストで生産することです。
多様化が進んでいる現在、多品種少数生産に対応できるかどうかは今後のものづくりのキーポイントになっていきます。このマスカスタマイゼーションを理想的に実現する上でも、産業用ロボットの進化は重要になります。
産業用ロボットの進化
それでは、産業用ロボットはどのように進化していくのでしょうか?
今までのロボットの動作設定は、作業者などがプログラミングによって指示していました。最近では、作業者がロボットの手や工具を直接動かして動作を教える「ダイレクトティーチング」も増えつつありますが、これもあくまで作業動作を人が教えていることに変わりはありません。今後の産業用ロボットは次のように進化していくといわれています。
 産業用ロボットの進化
産業用ロボットの進化それでは、各ステップについて詳細を確認していきましょう。
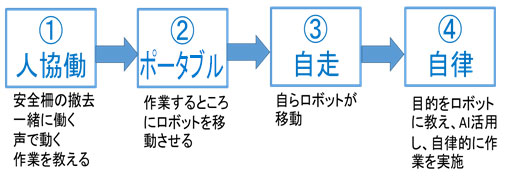
第1ステップは「人との協働」になります。規制の変更により、安全柵は必須では無くなりました。ロボットが「ぶつかりを検知する」「ぶつからない」「ぶつかっても安全」という条件を満足できれば、安全柵が無くても良いということになります。これにより、「人とロボットが近くで働く」「ロボットが人の作業の一部をサポートする」「ロボットが人の声で動く」「人がロボットへ作業を教える」など、人とロボットの協働作業が可能になりました。
第2ステップは「ロボットの移動」になります。これは、人が必要な場所にロボットを簡単に移動させることができるという意味です。従来は、生産ラインでロボットの位置は固定されており、個別生産やカスタマイズ品に対応するためには、製品を移動させる必要がありました。安全上の問題や製品の移動に対する労力を考えると、柔軟な対応は難しかったのです。人が必要な場所へロボットを簡単に移動させることができるならば、個別生産やカスタマイズ対応において、都度自由なレイアウトが可能になります。
第3ステップは「ロボットの自走」になります。第2ステップでも、ロボットを移動させることができましたが、人の力を借りて移動していました。この第3ステップでは、ロボット自身が、作業者が設定した位置へ自動で移動します。この移動は、従来の搬送車のAGV(Automatic Guided Vehicle)のような軌道線型ではありません。軌道線がなくても自走で移動できるのが「ロボットの自走」です。
第4ステップは「ロボットの自律」になります。第3ステップでは、ロボットが自走し、作業者が移動させる手間が無くなりましたが、移動の位置やタイミングは人が教える必要がありました。この「ロボットの自律」においては、目的をロボットに教えることで、AI(人工知能)などを活用し、自ら目的を達成するため最適な作業を実施することが可能となります。
今回の問題
それでは、IoT関連の知識・スキルアップに役立つ問題を出題します。今回は、上記の産業用ロボットの人との協働に関する問題となります。
問題(5)
今後のものづくりを考える上で、さらなる産業用ロボットの活用は不可欠です。そして現在、条件付きながら安全柵なしでのロボット運用が可能になるなど、人とロボットの協働作業が始まっています。次の産業用ロボットの人とロボットの協働作業について、現段階で、最も当てはまらないものを1つ選びなさい。
- 人との協働が可能な産業用ロボットは、現在のところ「動作が遅い」「広いスペースを必要とする」「力が弱い」「性能に対し価格が高い」などの課題がある。
- 従来の産業用ロボットは大量生産を主な目的としてきましたが、人との協働で利用される産業ロボットは、大量生産を目的にしていない。
- 国際規格「ISO 10218-2」の制定、労働安全衛生規則の改正、「JIS B8433-2」の設定などから一定以上の危険が無い場合は協働ロボットとして安全柵無しで利用できるようになった。
- 人とロボットの協働作業を前提とした安全確保のための「Safety 2.0」が提唱され、この実現のための手段としてもIoT(Internet of Things)の考えが利用される。
※本連載の設問が実際のIoT検定にそのまま出題されるわけではありません。
Copyright © ITmedia, Inc. All Rights Reserved.





会員登録がまだの方はこちら
豊富なホワイトペーパーの中から、製品・サービス導入の検討に役立つ技術情報や導入事例などを簡単に入手できます。
特集
- 設計者CAEの取り組みに関する実態
- マテリアルズ・インフォマティクスの動向調査
- 製造業のアナログ業務の実態調査
- 設計・解析業務におけるAI活用
- 製造現場におけるデータ活用の実態調査
- 3Dプリンタ利用動向調査
- CAD利用動向調査
- 研究・開発職のデジタル活用調査
- 安全安心なIoT機器実現の課題
- 電気設計者の課題と解決
- “つながる工場”の現状と課題
- 製造業におけるAI開発および活用の実態
- 設計・製造現場における品質管理
- 製造業IoTセキュリティ
- IoT時代の組み込みソフトウェア品質
- IoT時代のセキュリティリスクに備える
- 加速する工場と生産設備のデジタル化
- 製造業の省エネ対策と課題
- モノづくり設計者のワークスタイル調査
- タイアップ&セミナーコンテンツ一覧
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。