骨折部の創外固定器の設計開発に機構解析ソフトウェアを採用:エムエスシーソフトウェア Adams
エムエスシーソフトウェアは、静岡理工科大学理工学部の手外科微小外科領域先端医工学講座で、機構解析ソフトウェア「Adams」が活用されていることを発表した。
エムエスシーソフトウェア(MSC)は2016年4月、静岡理工科大学理工学部の野崎孝志准教授が、手外科微小外科領域先端医工学講座で、人体メカニズムの解析・制御などに機構解析ソフトウェア「Adams」を活用していると発表した。骨折部の創外固定器の開発において、動作確認のために用いているという。
同研究室では、これまで複数のMP関節部(指の根元の関節)の創外固定器の試作機を作製してきたが、手指の模型に装着させた際に、十分な関節可動域と安定した動作が得られていなかった。今回、挙動の改善にあたり、自動車のトランスミッションの継手の挙動をAdamsでシミュレーションした実績から、手指の生体構造に近いAdamsモデルを活用した。
シミュレーションでは、上肢のCADモデルをAdamsに読み込み、バネとビームを用いて骨格・筋・腱の生体構造を再現した。まず、手指関節の左右両側面に、2つの腱が交差するようにビームフォースを取り付け、さらに手指関節の手のひら側にバネ要素を付けて手指の関節を模擬した。その後、考案した固定器のCADモデルをAdamsに読み込み、手指モデルに固定して動作を確認。創外固定器が指の動きに対応することを確認した。
同研究室が開発した創外固定器は、指の角度変化に合わせる軸継手にダブルカルダン等速ジョイントを採用。2個の等速ジョイントを直列に接続することで、MP関節に必要な上下運動110度、横運動60度の自由度を確保しつつ、手指の背面側に固定できる。これにより、従来は側指部分に固定器があるため、骨折部がレントゲンに映りにくかったが、側面からのレントゲン撮影が可能になった。
今後は小型軽量化とより大きな関節可動域を追求し、骨折の治療からリハビリまでをカバーする創外固定器の開発を目指すとしている。
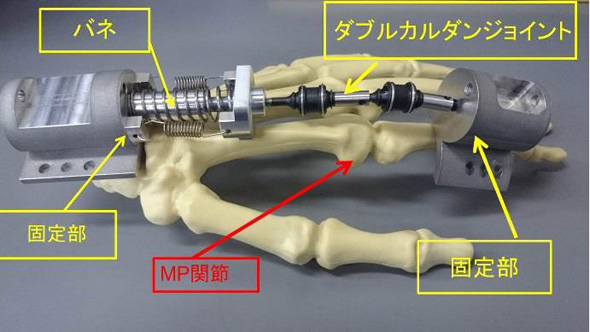 開発したMP関節部の創外固定器
開発したMP関節部の創外固定器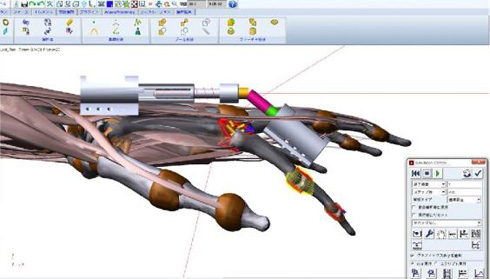 Adamにて検証した固定器と手指モデル
Adamにて検証した固定器と手指モデル関連記事
 FOCUSと外部データセンター間の専用回線/クラウドストレージを受注
FOCUSと外部データセンター間の専用回線/クラウドストレージを受注
ヴァイナスは、FOCUSと外部データセンターを結ぶための専用回線とクラウドストレージを提供。パブリッククラウドコンピュータの普及に伴う計算機需要の増加に対応するため計算能力の向上を図る。 最適化や非線形ソルバーの各種機能を強化したCAEプラットフォーム
最適化や非線形ソルバーの各種機能を強化したCAEプラットフォーム
Altairは、CAEプラットフォームの新製品「HyperWorks 14.0」を発表。最適化や非線形ソルバーの各種機能の強化や新機能追加などを行った。 次世代CAEプラットフォーム「MSC Apex Eagle」
次世代CAEプラットフォーム「MSC Apex Eagle」
エムエスシーソフトウェアは「MSC Apex Modeler」の第5世代と「MSC Apex Structures」の第3世代で構成される、次世代CAEプラットフォームの最新版「MSC Apex Eagle」を発表した。 光学パラメータの計算機能を追加、光学設計解析ソフト「CODE V 10.8」
光学パラメータの計算機能を追加、光学設計解析ソフト「CODE V 10.8」
サイバネットシステムは、シノプシスの光学設計解析ソフト「CODE V 10.8」の提供を開始。非対称光学系の設計を支援する光学パラメータの計算機能が追加されている。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.





会員登録がまだの方はこちら
豊富なホワイトペーパーの中から、製品・サービス導入の検討に役立つ技術情報や導入事例などを簡単に入手できます。
特集
- 設計者CAEの取り組みに関する実態
- マテリアルズ・インフォマティクスの動向調査
- 製造業のアナログ業務の実態調査
- 設計・解析業務におけるAI活用
- 製造現場におけるデータ活用の実態調査
- 3Dプリンタ利用動向調査
- CAD利用動向調査
- 研究・開発職のデジタル活用調査
- 安全安心なIoT機器実現の課題
- 電気設計者の課題と解決
- “つながる工場”の現状と課題
- 製造業におけるAI開発および活用の実態
- 設計・製造現場における品質管理
- 製造業IoTセキュリティ
- IoT時代の組み込みソフトウェア品質
- IoT時代のセキュリティリスクに備える
- 加速する工場と生産設備のデジタル化
- 製造業の省エネ対策と課題
- モノづくり設計者のワークスタイル調査
- タイアップ&セミナーコンテンツ一覧
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。